Rover
Stručný návod, jak postavit Rover
1. Zaktualizujte si svoje Raspberry Pi
2. Nastavte si AP na svém Pi
Podle tohoto tutoriálu.
3. Nainstalujte si tento balíček na svém Pi
V terminálu spusťte tento příkaz:
sudo apt-get install python-dev
4. Povolte I2C na Pi
V terminálu spusťte tento příkaz:
sudo raspi-config
V “Interafcing Options” vyberte I2C a potvrďte to.
Po tomto kroku je potřeba Pi restartovat. (budete vyzváni)
5. Nainstalujte balíček Python smbus2
V terminálu spusťte tento příkaz:
sudo pip3 install smbus2
6. Nainstalujte knihovnu pigpio
V terminálu spusťte tyto příkazy:
wget abyz.co.uk/rpi/pigpio/pigpio.zip
unzip pigpio.zip
cd PIGPIO
make
sudo make install
7. Nakopírujte program pro Rover
Nakopírujte obsah složky Rover/Python/ někam do svého Pi. Obsahy složek s
názvem test nejsou nutné k běhu programu, proto je můžete vymazat.
8. Pořiďte si plošný spoj, elektronické součástky a Lego kostičky
Potřebujete všechny součástky, které jsou ve schématu.
Kupte o 4 1nF kondenzátory více, než je v schématu. Budou připájeny mezi vývody motorů a obal motorů.
Návrh plošného spoje lze najít ve složce PCBs_schematics. Soubory jsou vytvořeny pomocí
programu KiCad.
Plošný spoj si můžete objednat například od JLCPCB.
V plošném spoji vyvrtejte díry pro držák senzoru a distanční sloupky na Pi. (v těch místech, kde není měď)
Spájejte plošný spoj a sestavte Lego kostičky podle tohoto návodu
Až si budete kupovat Lego kostičky, nekupujte “connector pegy” bez třecích výstupků. Konstrukce by pak nebyla tak pevná.
Některé konkrétní věci, co jsem použil:
- senzor
- servo
- hlavní motor (zvolil bych silnější)
- senzorový motor (verze 6V 200rpm)
- převody
- Li-Pol 3S 1300mAh baterie
- slip ring
- optozávora
9. Sestavte držák na senzor
Použil jsem balsové dřevo.
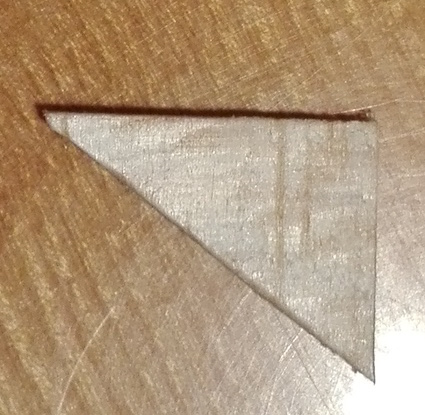
- Z balsy vyřízněte kotouč o průměru cca. 6cm. Dále malý trojúhelníček jako podpěru a kus balsy, do kterého vyvrtáte díru pro šroub,
kterým přišroubujete samotný senzor - tento kus musí být dost velký na to, aby mohla být díra na správném místě.
Přesné rozměry záleží na velikosti senzoru.



- V převodu (najdete ho v balíčku převodů v odkazu výše) udělejte větší díru

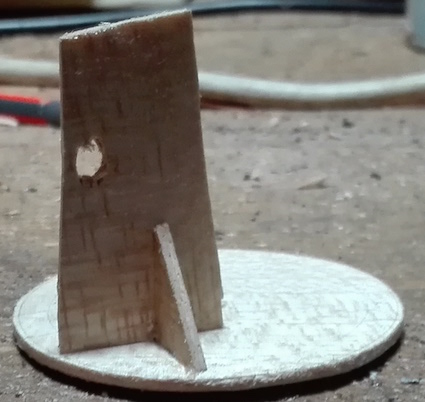
- Vyřízněte balsový kotouč (o něco menší průměr než převod) a přilepte ho k převodu. Vyvrtejte uprostřed díru:

- …přilepte k držáku:

- Přilepte držák ke slip ring (na pozdějších obrázcích je vidět, jak by to mělo vypadat)
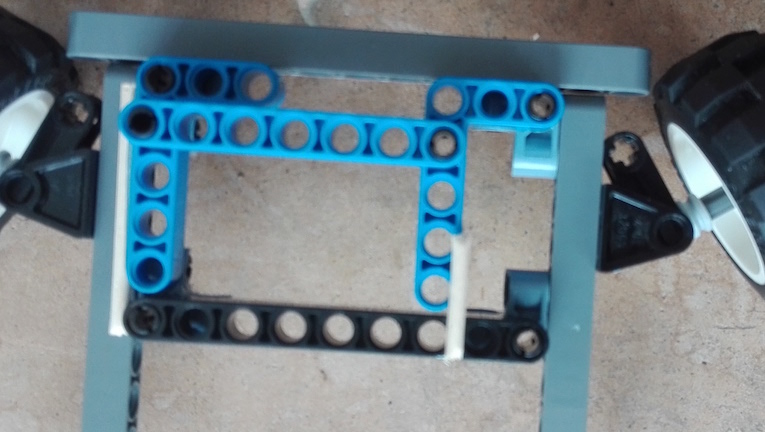
- Udělejte balsovou destičku:
Rozměry jsou přibližně 6,5cm x 9,5cm. Díry tvoří obdélník o rozměrech cca. 8cm x 4.8cm. Průměr děr je 5mm.

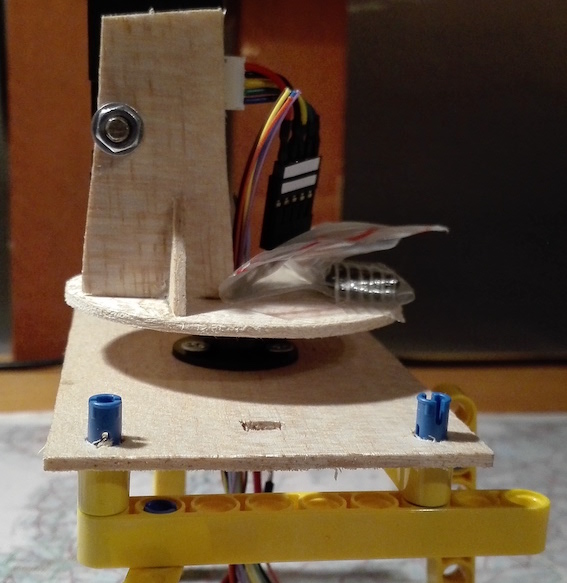
- Do destičky udělejte díru pro slip ring, senzorový motor a optozávoru. (jak by to mělo vypadat je opět vidět na následujících obrázcích)
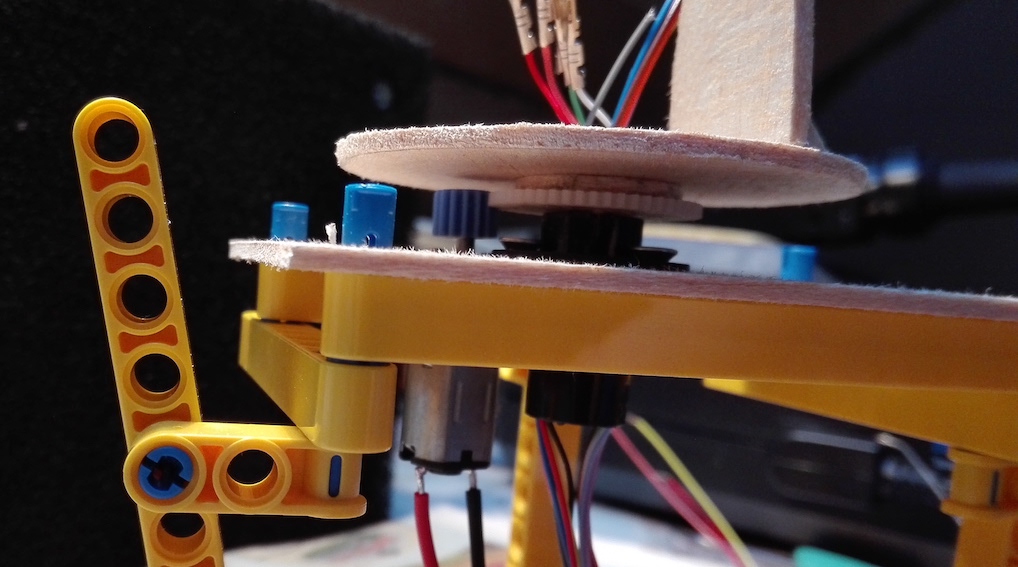
- Upevněte k destičce slip ring a motor (už s převodem). (Na obrázku jsem si to připevnil na pomocnou konstrukci z Lega):

- Připájejte konektor pro senzor:
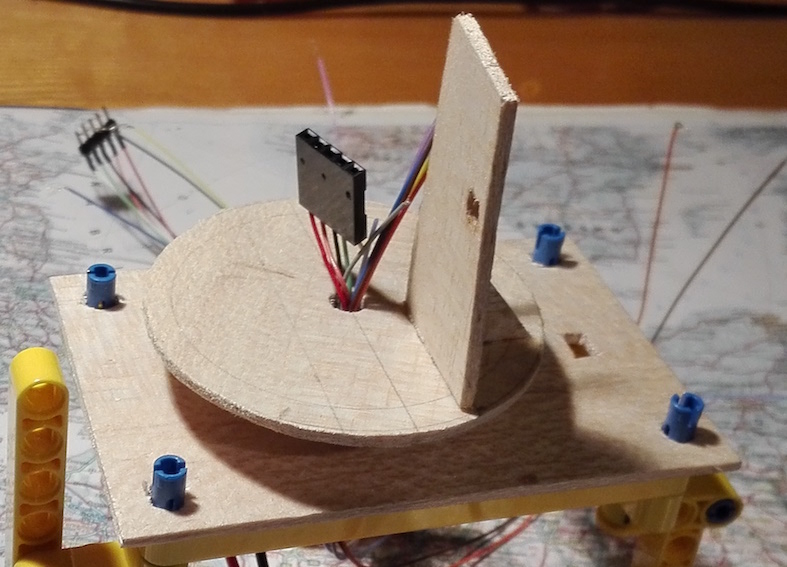
- Připájejete konektor ke kabelu jdoucímu ze senzoru a přišroubujte senzor k držáku:
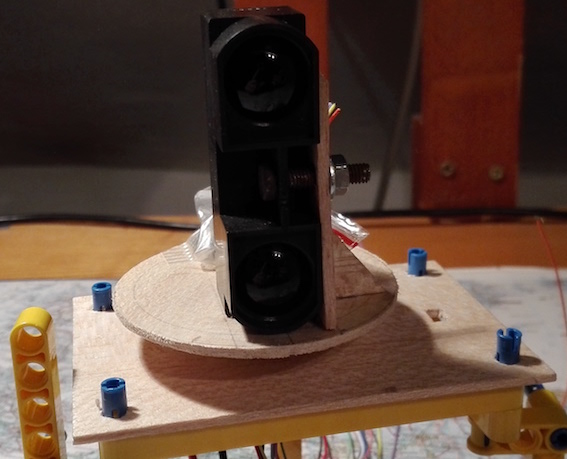
- Přidejte protizávaží naproti senzoru (Já jsem použil olověné kuličky. Měly by vážit stejně jako senzor):
- Vytvořte držák pro optozávoru a připevněte ji:

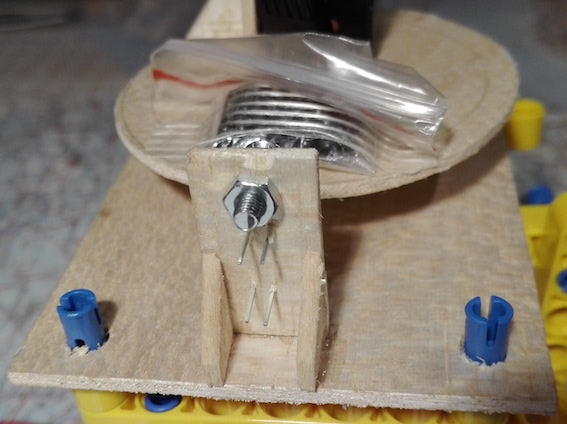
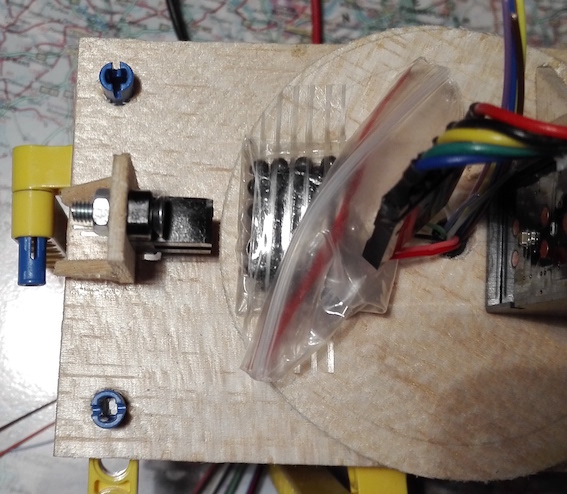
- Vyřízněte malý jazíček z balsy a přilepte ho ke kotouči. Musí to být uděláno tak, aby při každé otáčce prošel jazíček optozávorou:
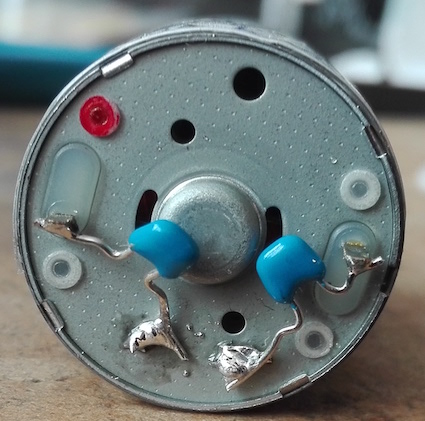
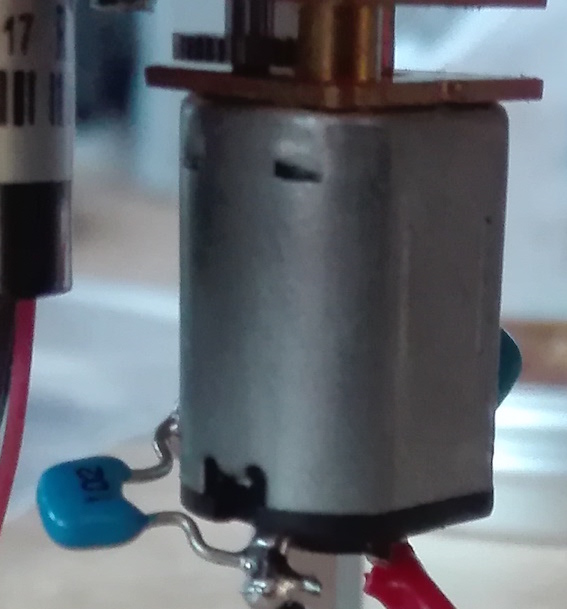
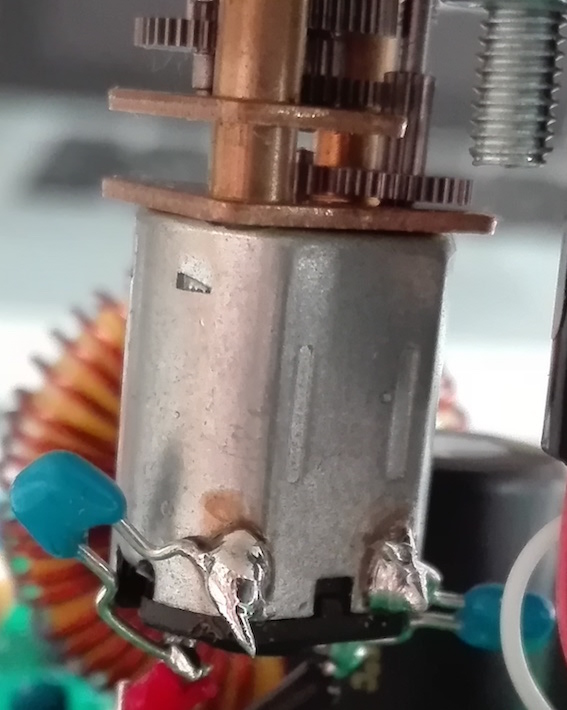
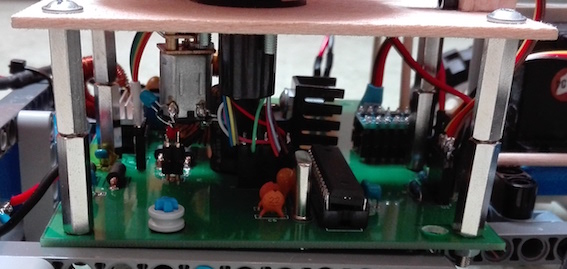
- Připájejte 1nF kondenzátory mezi vývody motorů a obal motorů (jak hlavní motor, tak i motor, co točí senzorem):
Teď byste měli mít držák senzoru sestavený.
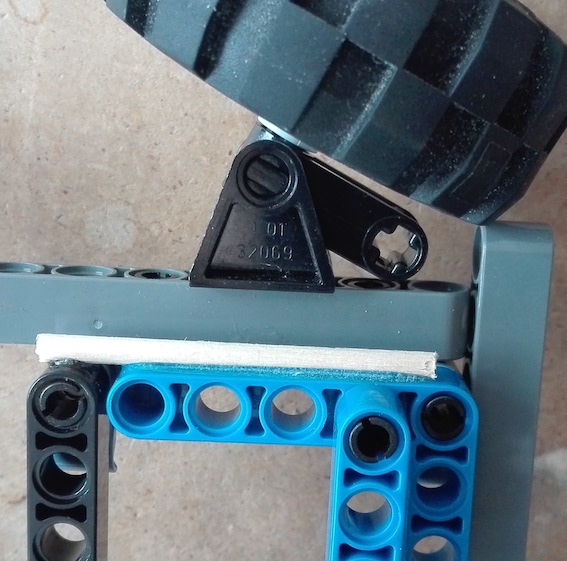
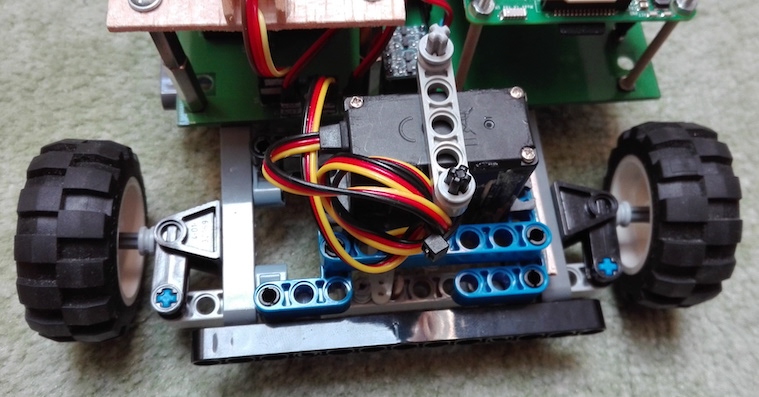
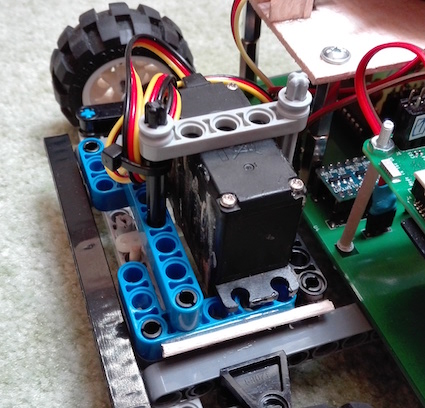
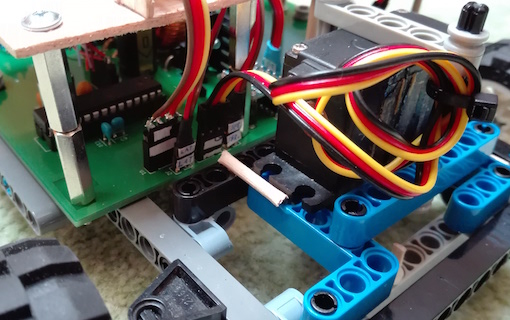
10. Pro zpevnění držáku na servo k němu můžete přilepit několik špejlí epoxidovým lepidlem:
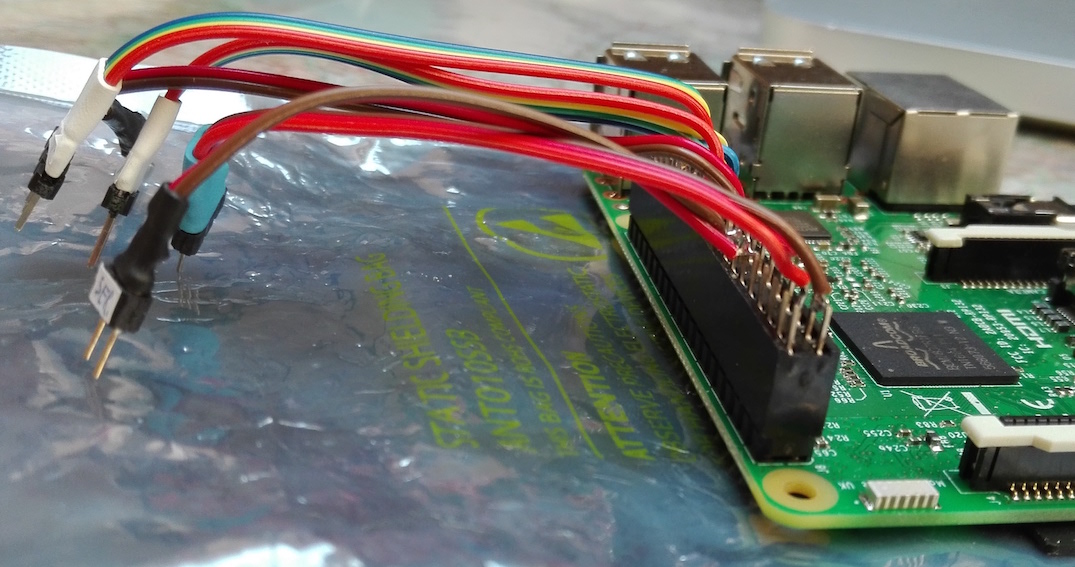
11. Připájejte kabely a konektory pro komunikaci Raspberry s ostatními částmi Roveru
(Je dobrý nápad je také označit)

12. Připevněte Pi a senzor k plošnému spoji
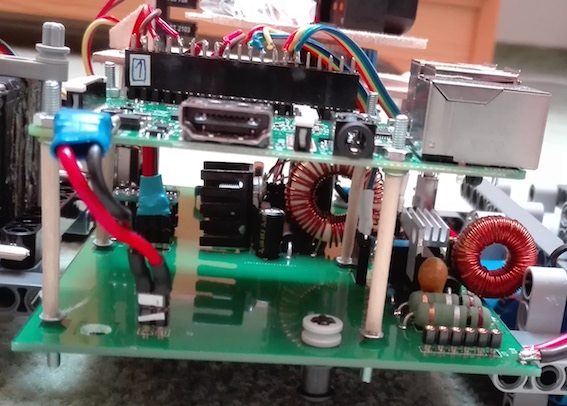
13. Všechno sestavte
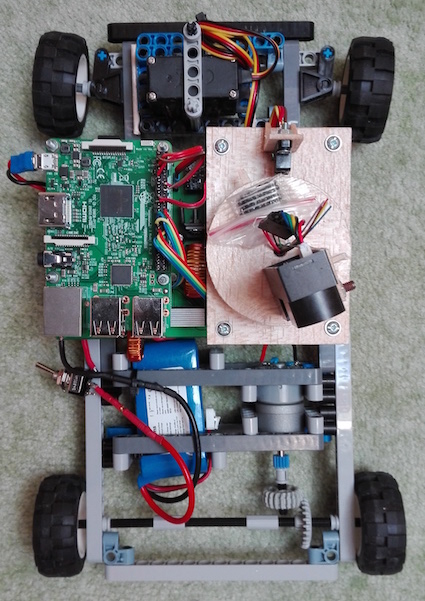
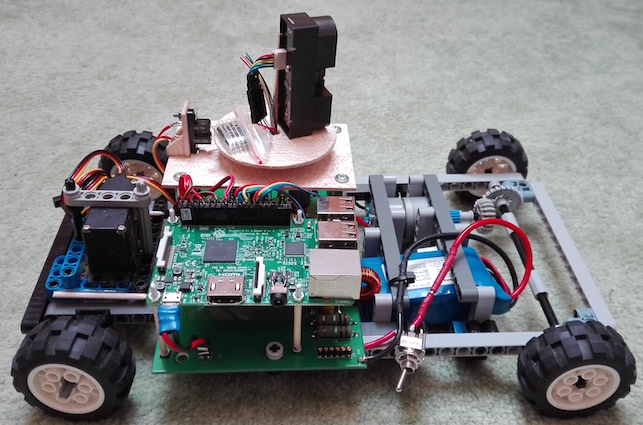
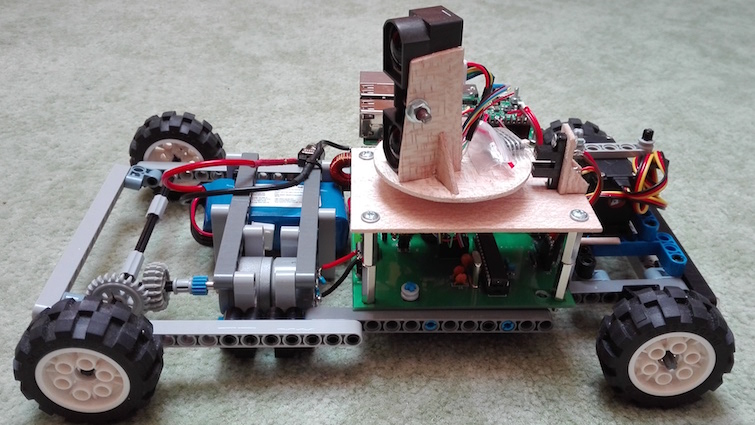
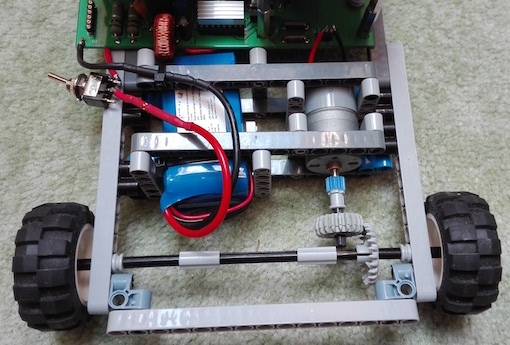
…a je to!